GNC, AOCS & Pointing Laboratory
The Guidance Navigation and Control (GNC), Attitude Orbit Control (AOCs) & Pointing Laboratory supports engineering research, evaluation and investigations for ESA Projects and R&D Programs through prototyping, characterisation and testing of the products related to GNC, AOCS and pointing systems
For general enquires regarding this TEC location please refer to the assigned contacts:

For testing requests, access to lab facilities, training and consultancy services, please refer to:
The laboratories main objectives are to:
- Support the technology and program developments by providing specific complementary measurements, evaluating performances / prototypes; preparing and validating methodologies and standards
- Conduct investigation in case of failure or anomaly occurrence, at component, board, equipment level, to help in determining the root cause of the anomaly, and make independent evaluation and assessment
- Support innovation, and the initiation of new space mission developments
- Support pre-flight verification campaigns
- Support the post flight analysis tasks with the aim to derive flight performance and increase the knowledge of design and development by lessons learnt
 +
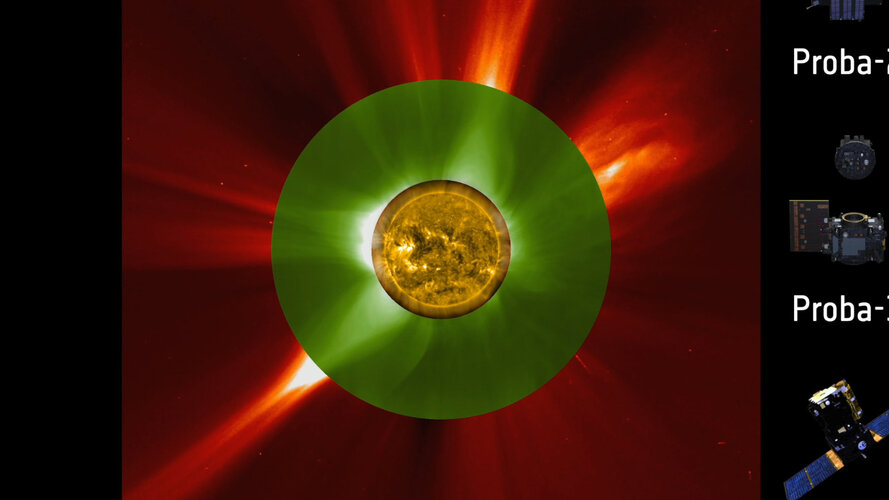
+Arm out to asteroid
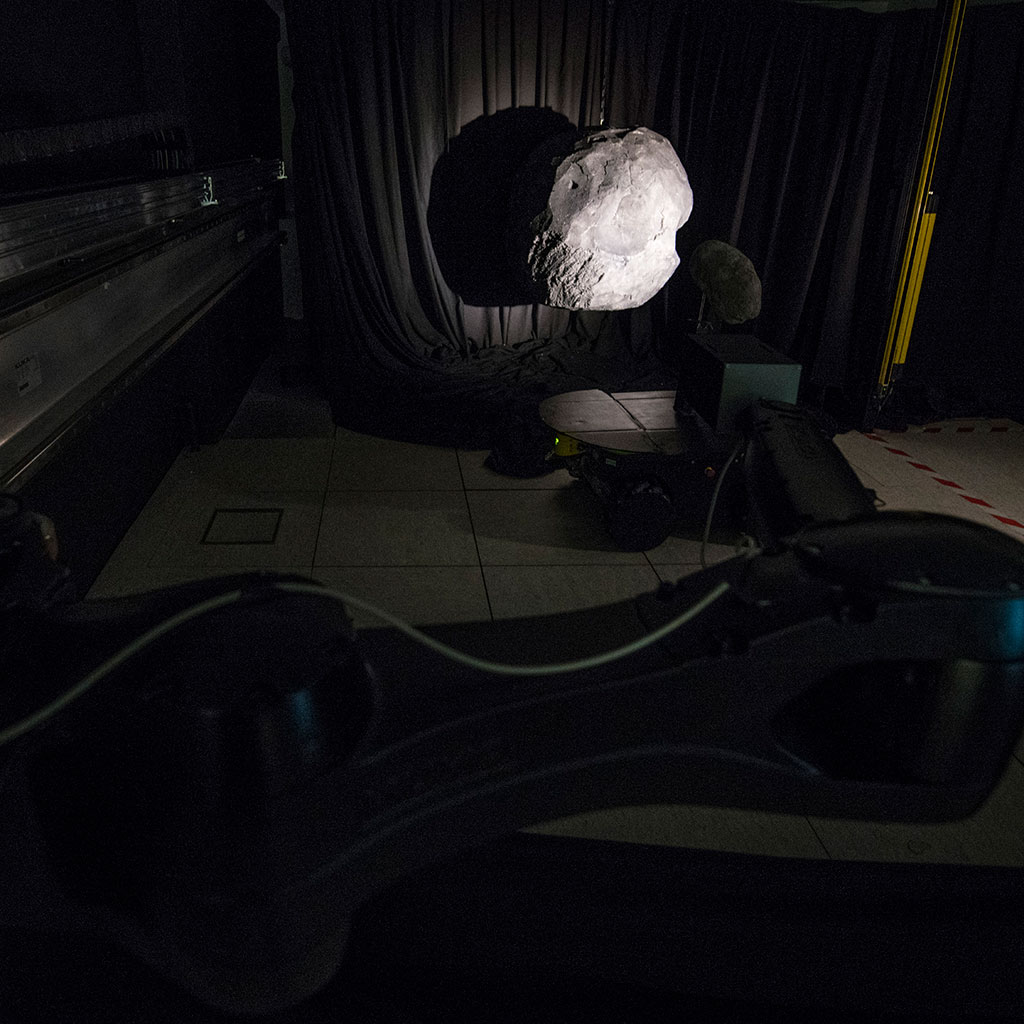 +
+Darkened GRALS chamber
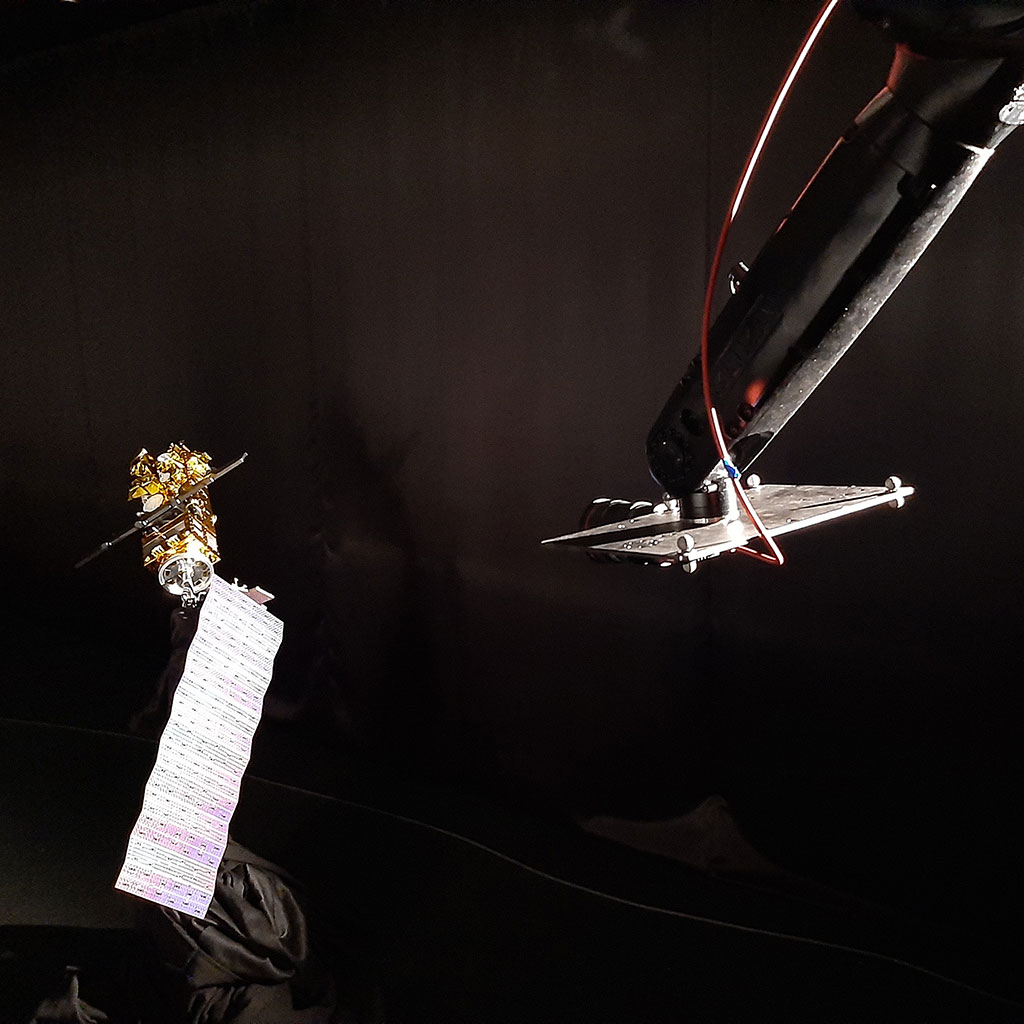 +
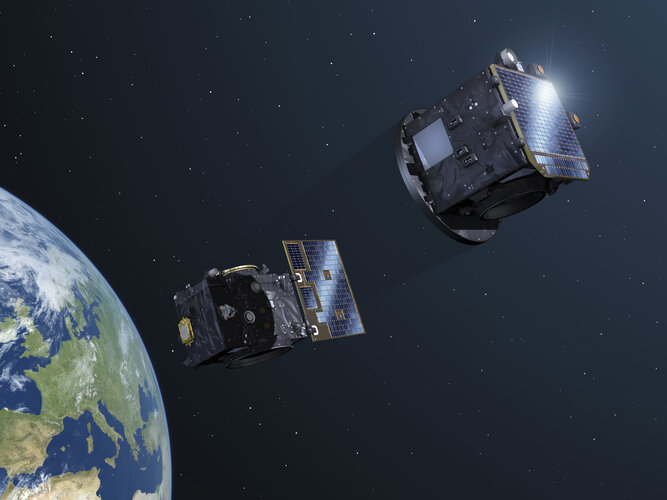
+Simulated satellite rendezvous
 +
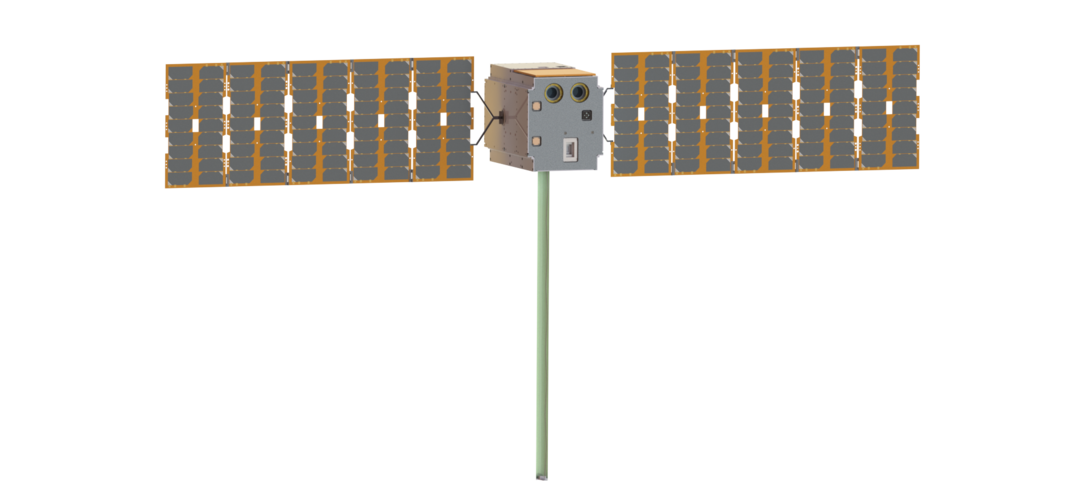
+PEMSUN marker for satellites
AOCS and Pointing Systems Test Facilities
The AOCS and Pointing Systems test facilities, managed by the AOCS and Pointing Systems section supports R&D activities related to AOCS verification, AOCS prototyping, implementation of innovative techniques for AOCS design and tuning, high accuracy pointing and dynamic systems.
The AOCS verification facilities include the capability to test full CubeSats or AOCS breadboards on a 3-axis air bearing table. By careful mass balancing, it is possible to reproduce the low-disturbance orientation dynamics of space and physically stimulate sensors using a Sun lamp, magnetic field generator and an albedo straylight lamp. This allows the spacecraft AOCS to react as if it was on orbit such that its open or closed-loop behaviour can be witnessed in real-time. This test-as-you-fly facility is housed in an ISO8 clean tent, enabling ESA collaborators to gain extra confidence in their AOCS before flight. For instance, the customers can watch their AOCS perform detumble control and 3-axis slews.
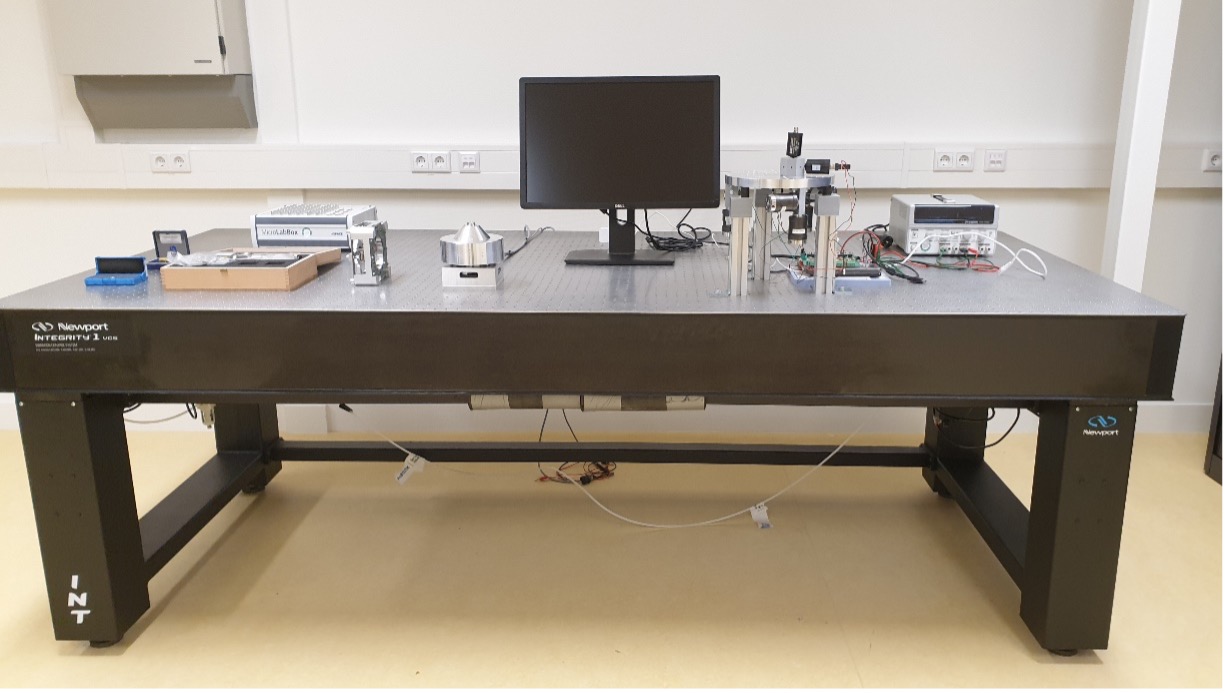
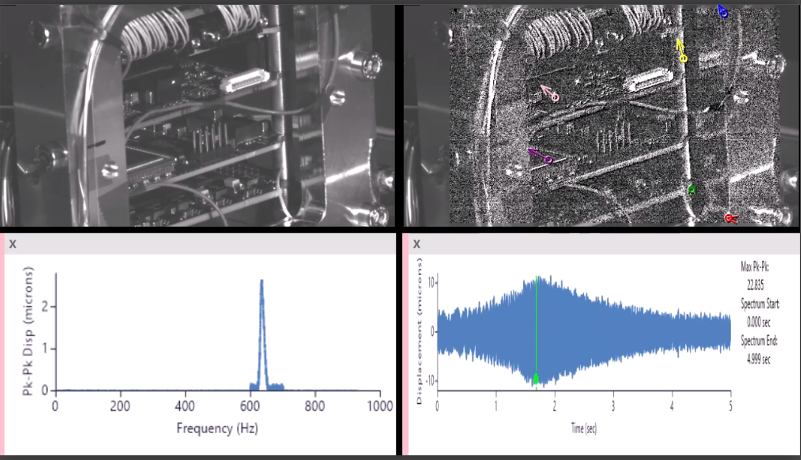
The Pointing systems facilities are used to develop and tests a system mitigating the micro-vibrations generated by a wheel or by a cryo-cooler. This closed loop system uses force cells or IMU as sensors, a MICROLABBOX or a Raspberry PI as CPU, and 6x Proof Mass Actuators. Additionally, a fast and high definition camera and associated software performs motion amplification visualising and measuring micro-vibrations of complete structures in a non-intrusive way up to 3000Hz.
Instruments & technical parameters
Piezo tip-tilt mirror and associated electronics from PI
S330, S335
IO hardware interface and software from dSpace
MICROLABBOX
Accelerometers and conditioners from PCB
352C33 (x2), 356B18 (x2)
ICP accelerometers from WILCOXON
731-207
Accelerometers conditioners from PCB
482C05
Laser Autocollimator from LDS
CONEX LDS
Fast Steering Mirror from CEDRAT
4-channel charge amplifier from BRUEL & KJAER
NEXUS 2692 (x3)
Optical table from NEWPORT
M-INT1-49-8-A
Services
TESTING
- Performance Evaluation
- Test Beds Development
- Vision-Based Techniques Testing
- Closed Loop Testing
- Test Methods Development
- Life Testing
- Anomaly Investigations











WE CAN HELP YOU GET THE BEST OUT OF OUR LABORATORIES
FOR FURTHER INFORMATION REGARDING THE ACCESS TO THE LABORATORY
Contact us via email